![]()
トップ > セキュアデバイス研究センター
セキュアデバイス研究センター
セキュアデバイス研究センター
 |
小池 康晴 教授 |
|
居室:J3-1120 |
- 研究分野 セキュアデバイス研究センター
- 研究目的・意義 運動制御や視覚情報処理などの脳機能の解明とヒューマンインタフェースへの応用
- 最近の研究課題
・計算論的神経科学
・筋骨格系のモデル化
・ブレインマシンインタフェース
・筋電信号を用いたヒューマンインタフェース
・強化学習を用いたスキル獲得モデル
*最近の主な研究(PDF)
 |
|
筋電信号を用いたインタフェー:筋肉の活動を示す筋電信号を計測し,仮想世界のロボットや自分の分身を動かすことができる。 |
 |
金 俊完 准教授 |
|
居室:J3-1115 |
- 研究分野 セキュアデバイス研究センター
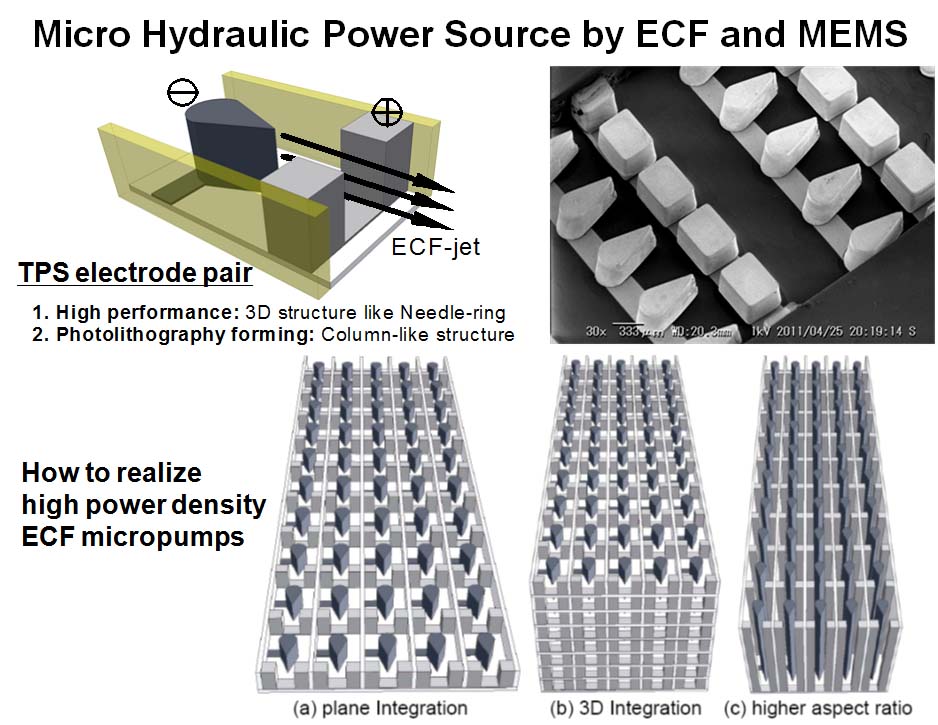
- 研究目的・意義 MEMS技術による新原理マイクロメカトロニクスの実現とその応用
- 最近の研究課題
・ECFを用いたマイクロ液圧システム(マイクロポンプ)
・ECFジェット流を用いた強制液冷システム
・ECFフレキシブルアクチュエータ(マイクロハンド,マイクロマニピュレータ)
・可変焦点形ECFマイクロレンズシステム
・ECFマイクロレートジャイロ
*最近の主な研究
 |
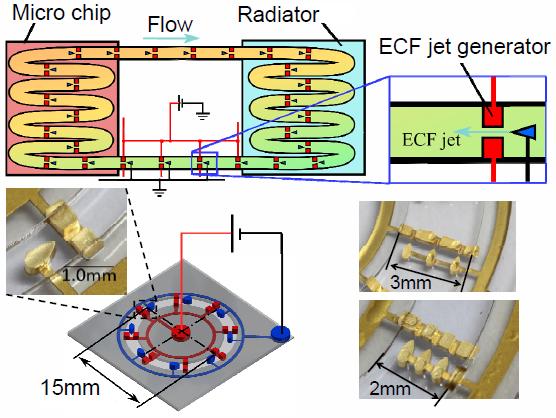 |
| 三角柱-スリット(TPSE)形ECFマイクロポンプ | ECFマイクロポンプを用いた強制液冷 |
客員研究部門
 |
川人 光男 教授 |
|
居室:R2-516 |
- 研究分野 計算論的神経科学
- 研究目的・意義 脳を知るために脳を創り、脳を創るために脳を知り、また最終的には脳を創ることができる程度に脳を知ることを目指しています
- 最近の研究課題
・小脳の内部モデル
・ロボットの見まね学習
・脳活動推定アルゴリズムの開発
・ブレインマシンインタフェースの開発
*最近の主な研究(PDF)
 |
 |
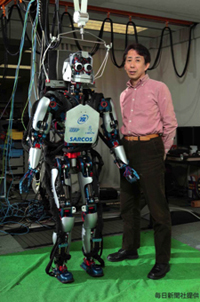
| 新規に開発した、51自由度を持つヒューマノイドロボット:CBi | 外骨格ロボット |
 |
柴田 隆行 教授 |
|
居室: |
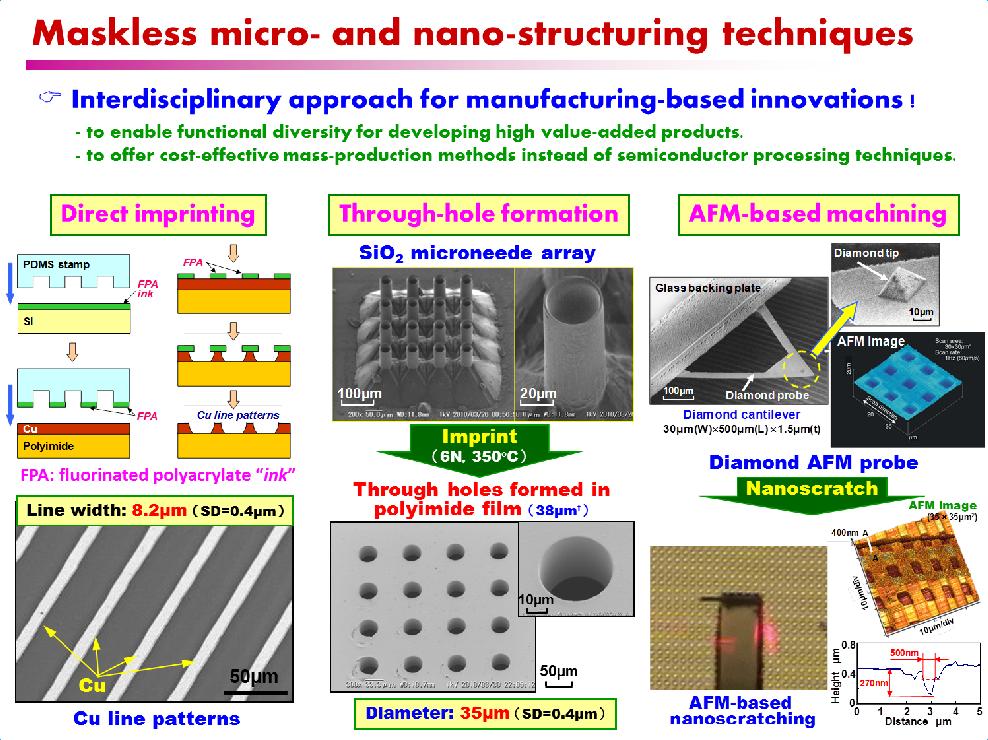
- 研究分野 セキュアデバイス研究センター
- 研究目的・意義
・マイクロ・ナノ構造創成技術の開発
・細胞機能解析用MEMSプラットフォームの開発 - 最近の研究課題
・ナノ計測一体型超微細加工システム
・マイクロ・ナノ転写加工技術
・超並列オンチップ細胞機能解析システム
・多機能走査型バイオプローブ顕微鏡
*最近の主な研究
 |
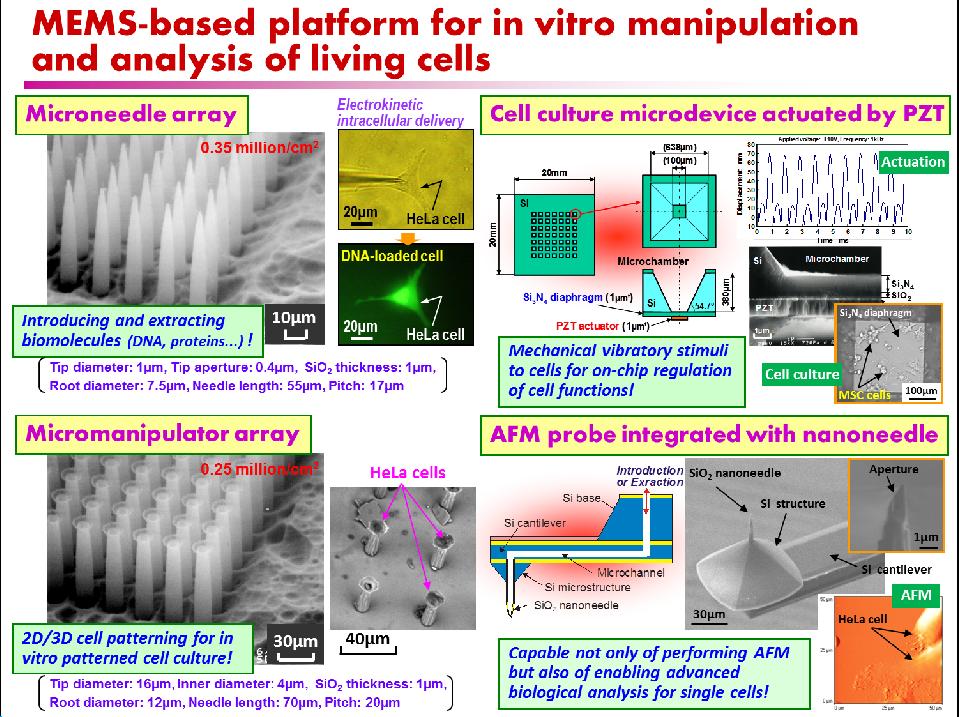 |
| マイクロ・ナノ構造創成技術の開発 | 細胞機能解析用MEMSプラットフォームの開発 |
 |
田中 英一郎 准教授 |
|
居室: R2-313 |
- 研究分野 セキュアデバイス研究センター
- 研究目的・意義
・麻痺患者・高齢者向けライフサポート機器の開発
・熟練者の代わりとなる自動異常診断 - 最近の研究課題
・麻痺患者ニューロリハビリテーション用・高齢者運動促進用歩行補助機の開発
・上肢作業・起立着座・持ち上げ等の動作補助機の開発
・レーザ反射光を用いた歯車装置自動異常診断技術の開発
*最近の主な研究(近日公開予定)
 |
準客員研究部門
 |
張 暁林 教授 |
|
居室:R2-810 |
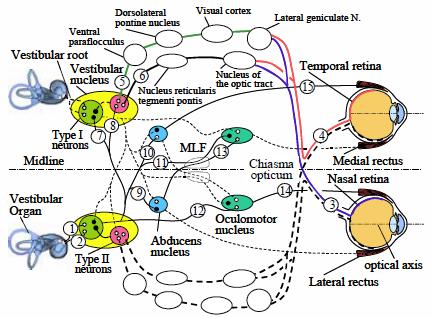
- 研究分野 認知機構
- 研究目的・意義
・生物の視覚機能およびその原理の解明とロボットビジョンへの応用
・神経細胞の物理的情報処理原理の解明とその電気的等価回路の実現 - 最近の研究課題
・眼球運動制御の原理を用いた両眼アクティブビジョン
・神経細胞の電気的等価回路と信号解析
・眼球固視微動の計測システムの開発及び固視微動の解析
・数学を用いた神経眼科疾患の局在診断
・両眼アクティブ監視カメラ
*最近の主な研究(PDF)
 |
 |
| 両眼水平運動の視覚信号関連の神経経路 | 眼球運動神経モデルを用いたRobo-eye(輻輳) |
 |
川嶋 健嗣 教授 |
|
居室:R2-420 |
- 研究分野 動的システム
- 研究目的・意義 流体駆動システムの計測制御方法の探求
- 最近の研究課題
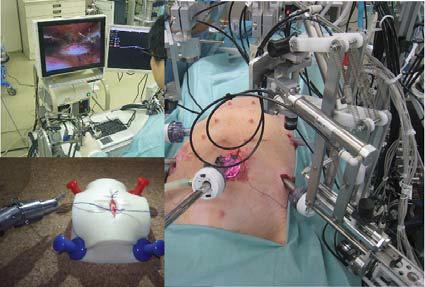
・触覚を有する遠隔操縦対応型低侵襲外科手術用ロボットシステム
・非接触型空気圧サーボテーブルシステムの超精密位置決め制御
・空気圧ゴム人工筋を用いたパワーアシスト装置
・鉄道車輌や半導体製造装置用空気ばねのアクティブ制御
・実験と数値計算の融合による流れ場のモニタリングシステム
*最近の主な研究(PDF)
 |
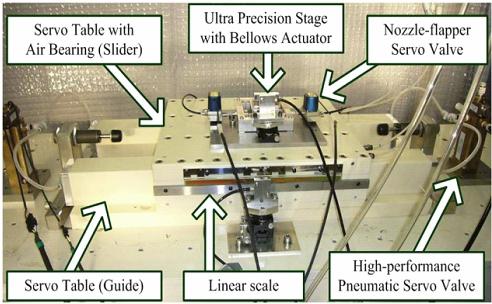 |
| 試作した多自由度鉗子による実験風景 | 空気圧アクチュエータ用いた粗微動ステージ |
![]()
- 大岡山キャンパス
- 〒152-8550 東京都目黒区大岡山2-12-1

- すずかけ台キャンパス
- 〒226-8503 神奈川県横浜市緑区長津田町 4259
- 田町キャンパス
- 〒108-0023 東京都港区芝浦3-3-6
![]()
Copyright (C) Tokyo Institute of Technology. All rights reserved.